


Autres produits machine
Robot de soudage industriel Rbqlty
Nom : Robot de soudage industriel multi-articulé automatique Marque : Rbqlty Catégorie : Autres machines de produits Type de modèle : RB10-1440 Prix : CONSULTER
Description du produit
Robot de soudage
Introduction aux composants
Les robots de soudage sont des robots industriels engagés dans le soudage (y compris la découpe et le pulvérisation). Selon la définition de l'Organisation internationale de normalisation (ISO), un robot industriel est un robot de soudage standard, un robot industriel est un manipulateur à contrôle automatique polyvalent et reprogrammable, avec trois axes programmables ou plus pour le domaine de l'automatisation industrielle. Afin de s'adapter à différents objectifs, l'interface mécanique du dernier axe du robot est généralement une bride de connexion, qui peut être connectée à différents outils ou effecteurs finaux. Le robot de soudage est équipé de pinces de soudage ou de pistolets de soudage (découpe) sur la bride du dernier axe du robot industriel, afin qu'il puisse effectuer des opérations de soudage, de découpe ou de pulvérisation thermique.
Avec le développement de la technologie électronique, de la technologie informatique, du contrôle numérique et de la technologie des robots, le robot de soudage automatique est utilisé dans la production depuis les années 1960, et sa technologie est devenue de plus en plus mature. Par conséquent, il a été largement utilisé dans diverses industries.
Ⅰ.Images de machines pour référence



Composants
Configuration de la machine
1 | Configuration du robot | robot | MR10W-1440 MR12-2010 | 1 | Rayon de travail 1440mm
Rayon de travail 2010mm |
2 |
| Armoire de contrôle |
| 1 | Le contrôle de l'entraînement à 6 axes intégré couvre la plupart des interfaces externes requises par les utilisateurs : 16 interfaces d'entrée et de sortie, 1 Ethernet, 2 interfaces de signal analogique IN/OUT, et conserve deux interfaces d'expansion fonctionnelles personnalisables, qui peuvent être utilisées comme interfaces de signal CAN&485 et d'encodeur. |
3 |
| Pendentif d'enseignement | T30 | 1 | Écran tactile TFT grande version système LINUX |
4 | Soudeur | Alimentation de soudage | Ota | 1 | Contient Aotai IIAG-500RP, pistolet de soudage anti-collision, alimentation de fil, bobine de fil, tuyau d'alimentation de fil, câble haute flexibilité, et boîte de réservation à deux stations. |
SPÉCIFICATION DE LA MACHINE À SOUDER
1.MAG-350RL

Tension/fréquence d'entrée nominale (V/HZ) | Triphasé 380±10% /50 |
Capacité d'entrée nominale (KVA) | 14 |
Courant d'entrée nominal (A) | 21 |
Tension de sortie nominale (V) | 31.5 |
Cycle de service nominal (%) | 60 |
Tension de sortie à vide (V) | 96 |
Plage de courant/tension de sortie (A/V) | 60/17-350/31.5 |
Diamètre du fil (MM) | 0.8, 1.0, 1.2 |
Débit de gaz (L/MIN) | 15-20 |
Méthode de refroidissement du pistolet | Refroidissement à air |
Classe de protection de l'enveloppe | IP23 |
Classe d'isolation | H |
Dimensions LXWXH (CM) | 66x32x56 |
Poids (KG) | 55 |
2.Pulse MLG-500RP Super Plus

Tension/fréquence d'entrée nominale (V/HZ) | Triphasé 380±15% 50/60 |
Capacité d'entrée nominale (KVA) | 24 |
Courant d'entrée nominal (A) | 38 |
Tension de sortie nominale (V) | 39 |
Cycle de service nominal (%) | 100 |
Tension de sortie à vide (V) | 76 |
Plage de courant/tension de sortie (A/V) | 30/15.5-500/39 |
Diamètre du fil (MM) | 0.8, 1.0, 1.2, 1.4, 1.6 |
Débit de gaz (L/MIN) | 15-20 |
Méthode de refroidissement du pistolet | Refroidissement à air |
Classe de protection de l'enveloppe | IP23 |
Classe d'isolation | H |
Dimensions LXWXH (CM) | 66x32x56 |
Poids (KG) | 55 |
3.NBC 500RP Plus

Tension/fréquence d'entrée nominale (V/HZ) | Triphasé 380±15% 50/60 |
Capacité d'entrée nominale (KVA) | 24 |
Courant d'entrée nominal (A) | 38 |
Tension de sortie nominale (V) | 39 |
Cycle de service nominal (%) | 100 |
Tension de sortie à vide (V) | 76 |
Plage de courant/tension de sortie (A/V) | 30/15.5-500/39 |
Diamètre du fil (MM) | 0.8, 1.0, 1.2, 1.4, 1.6 |
Débit de gaz (L/MIN) | 15-20 |
Méthode de refroidissement du pistolet | Refroidissement à air |
Classe de protection de l'enveloppe | IP23 |
Classe d'isolation | H |
Dimensions LXWXH (CM) | 66x32x56 |
Poids (KG) | 55 |
Paramètres techniques
1.MR10W-1400-D
Paramètre technique du robot
Modèle | MR10W-1400-D | ||
Axe | 6 | ||
Rayon de mouvement | 1440mm | ||
Capacité de puissance | 4.5KVA | ||
Charge utile | 10KG | ||
Répétabilité | ±0.05mm | ||
Masse du robot | 210KG | ||
Capacité de puissance | Ф10 | ||
Classe de protection | IP56/IP67 | ||
Signaux | Standard 16 entrées/16 sorties 24VDC | ||
Installer | Floor-standing/bracket-type/inverted-hanging | ||
Plage de mouvement et vitesse | |||
Axe 1 S | Vitesse de mouvement 285°/s | Plage de mouvement ±167° | |
Axe 2 L | Vitesse de mouvement 247°/s | Plage de mouvement de +80°à -145° | |
Axe 3 U | Vitesse de mouvement 285°/s | Plage de mouvement de +145°à -75° | |
Axe 4 R | Vitesse de mouvement 392°/s | Plage de mouvement ±190° | |
Axe 5 B | Vitesse de mouvement 272°/s | Plage de mouvement de +50° à -210° | |
Axe 6 T | Vitesse de mouvement 1353°/s | Plage de mouvement ±220° | |
Axe 4 R(N.m) | 103.5 | ||
Axe 5 B (N.m) | 51.84 | ||
Axe 6 T (N.m) | 32.64 | ||
Paramètres du tableau de contrôle
Dimensions globales | 700(larg)*530(prof)*740(haut)mm (y compris les saillies) |
Qualité brute | 60KG |
Méthode de refroidissement | Refroidissement direct |
Spécifications de puissance | AC220V 50/60HZ |
Mise à la terre | Mise à la terre industrielle (mise à la terre spéciale avec résistance de mise à la terre inférieure à 1000) |
Signal d'entrée/sortie | Signal général : entrée 16, sortie 16 (16 entrées 16 sorties) |
Méthode de contrôle de position | Méthode de communication série EtherCAT.TCP/IP |
Capacité de mémoire | JOB : 200 000 étapes, 10 000 commandes de robot (200M au total) |
LAN (lien hôte) | Ethercat (1) TCP/IP (1) |
Mode de contrôle | Servo logiciel <contrôle de position> |
Température ambiante | Lors de la mise sous tension : 0~+45℃, lors du stockage : -20~+60℃ |
Unité de pilote | Paquet servo pour servo AC (6 axes au total) ; des axes externes peuvent être ajoutés |
Humidité relative | 10%~90% (sans condensation) |
Vibrer | 0.5G ou moins |
Port série I/F | |
RS485 (un) RS422 (un) RS232 (un) interface CAN (un) interface USB (un) | |
Altitude | |
En dessous de 1000m au-dessus du niveau de la mer, la température ambiante maximale diminue de 1% pour chaque augmentation de 100m au-dessus de 1000m, et peut être utilisée à un maximum de 2000m | |
Autre | |
Pas de poussière, liquide de coupe (y compris le liquide de refroidissement), solution organique, fumée d'huile, eau, sel, médicament, huile antirouille, micro-ondes puissantes, lumière ultraviolette, rayons X, exposition aux radiations | |
Spécifications du pendentif de programmation
Dimensions globales | 280(L)*220(P)*120(H)mm (y compris les saillies) |
poids brut | 0.6KG |
qualité du matériau | Plastique renforcé |
écran d'affichage | Écran LED couleur de 8 pouces, écran tactile 640*480 pixels |
classe de protection | IP54 |
Longueur de câble | Standard : 5m ; Optionnel : 15m |
manipulateur | |
Touche de sélection, touche de fonctionnement de l'axe, touche de valeur/application, touche de changement de mode avec touche/(mode d'enseignement, mode de lecture, mode à distance), touche d'arrêt d'urgence, touche d'activation, 1 port USB | |
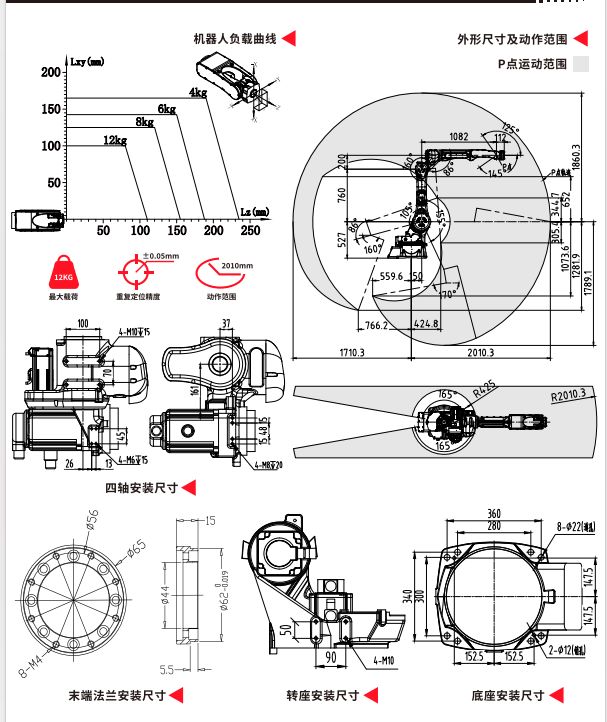
2.MR12-2010
Paramètre technique du robot
Modèle | MR12-2010 | ||
Axe | 6 | ||
Rayon de mouvement | 2010mm | ||
Capacité de puissance | 4.5KVA | ||
Charge utile | 12KG | ||
Répétabilité | ±0.05mm | ||
Masse du robot | 313KG | ||
Capacité de puissance | Ф10 | ||
Classe de protection | IP56/IP67 | ||
Signaux | Standard 16 entrées/16 sorties 24VDC | ||
Installer | Floor-standing/bracket-type/inverted-hanging | ||
Plage de mouvement et vitesse | |||
Axe 1 S | Vitesse de mouvement 203°/s | Plage de mouvement ±165° | |
Axe 2 L | Vitesse de mouvement 203°/s | Plage de mouvement de +80°à -145° | |
Axe 3 U | Vitesse de mouvement 214°/s | Plage de mouvement de +145°à -75° | |
Axe 4 R | Vitesse de mouvement 392°/s | Plage de mouvement ±190° | |
Axe 5 B | Vitesse de mouvement 276°/s | Plage de mouvement de +50° à -210° | |
Axe 6 T | Vitesse de mouvement 1356°/s | Plage de mouvement ±220° | |
Axe 4 R(N.m) | 88.5 | ||
Axe 5 B (N.m) | 45.52 | ||
Axe 6 T (N.m) | 32.64 | ||
Paramètres du tableau de contrôle
Dimensions globales | 700(larg)*530(prof)*740(haut)mm (y compris les saillies) |
Qualité brute | 60KG |
Méthode de refroidissement | Refroidissement direct |
Spécifications de puissance | AC220V 50/60HZ |
Mise à la terre | Mise à la terre industrielle (mise à la terre spéciale avec résistance de mise à la terre inférieure à 1000) |
Signal d'entrée/sortie | Signal général : entrée 16, sortie 16 (16 entrées 16 sorties) |
Méthode de contrôle de position | Méthode de communication série EtherCAT.TCP/IP |
Capacité de mémoire | JOB : 200 000 étapes, 10 000 commandes de robot (200M au total) |
LAN (lien hôte) | Ethercat (1) TCP/IP (1) |
Mode de contrôle | Servo logiciel <contrôle de position> |
Température ambiante | Lors de la mise sous tension : 0~+45℃, lors du stockage : -20~+60℃ |
Unité de pilote | Paquet servo pour servo AC (6 axes au total) ; des axes externes peuvent être ajoutés |
Humidité relative | 10%~90% (sans condensation) |
Vibrer | 0.5G ou moins |
Port série I/F | |
RS485 (un) RS422 (un) RS232 (un) interface CAN (un) interface USB (un) | |
Altitude | |
En dessous de 1000m au-dessus du niveau de la mer, la température ambiante maximale diminue de 1% pour chaque augmentation de 100m au-dessus de 1000m, et peut être utilisée à un maximum de 2000m | |
Autre | |
Pas de poussière, liquide de coupe (y compris le liquide de refroidissement), solution organique, fumée d'huile, eau, sel, médicament, huile antirouille, micro-ondes puissantes, lumière ultraviolette, rayons X, exposition aux radiations | |
Spécifications du pendentif de programmation
Dimensions globales | 280(L)*220(P)*120(H)mm (y compris les saillies) |
poids brut | 0.6KG |
qualité du matériau | Plastique renforcé |
écran d'affichage | Écran LED couleur de 8 pouces, écran tactile 640*480 pixels |
classe de protection | IP54 |
Longueur de câble | Standard : 5m ; Optionnel : 15m |
manipulateur | |
Touche de sélection, touche de fonctionnement de l'axe, touche de valeur/application, touche de changement de mode avec touche/(mode d'enseignement, mode de lecture, mode à distance), touche d'arrêt d'urgence, touche d'activation, 1 port USB | |
Enquête en ligne
Adresse: Parc industriel de Bowang, secteur de Bowang, Ma'anshan, Anhui




